自动驾驶汽车的受欢迎程度将以滚雪球的速度增加
今天,边肖将与你分享一些关于自动驾驶汽车像滚雪球一样普及的知识,丰富你的知识。如果你有兴趣了解自动驾驶汽车像雪球一样越来越受欢迎,你可以继续往下看。
根据IHS Markit的研究,未来20年,自动驾驶汽车的普及程度将以雪球般的速度增长,到2040年,26%的新车将具备自动驾驶能力。对于L3级别以上的自动驾驶汽车,高精度地图一直是必不可少的“基础设施”。
6月20日,国家智能交通系统标准化技术委员会在官网正式发布了《关于对《智能运输系统 智能驾驶电子地图数据模型与交换格式(征求意见稿)》等两项国家标准征求意见的通知》。
据了解,《智能运输系统 智能驾驶电子地图数据模型与交换格式》系列标准计划分为两部分:第一部分:高速公路;第二部分:城市道路。
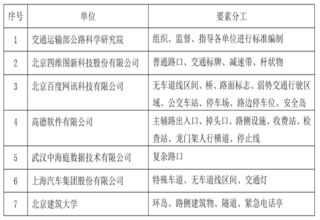
本标准由北京纳维丰新技术有限公司编辑,高德软件有限公司、北京百度网讯技术有限公司、交通运输部公路科学研究院、武汉钟海婷数据技术有限公司、上海汽车集团有限公司、北京建筑大学起草。
2015年10月29日,成立标准起草组,讨论高精度地图数据模型提案起草过程中具体数据模型的分割方法和优先顺序。具体分工如下:
003010指出,自动驾驶系统包括环境感知与定位、智能规划与决策、控制执行三大核心模块,高精度地图是各类感知系统中尤为关键的一环。
高精度地图不受各种气候环境影响,可为车辆纵向加减速、横向转向、变道等决策提供精准定位和精准车道预测,避免沙尘暴、浓雾等极端气候下传感器误判导致自动驾驶系统失效而引发交通事故,保障自动驾驶车辆在任何环境下的安全。它的应用可以大大降低自动驾驶汽车对昂贵传感器的依赖,有利于降低成本,更快进入批量产业化。
003010表示,由于高精度地图是智能驾驶的关键基础技术,是否有高质量、高精度的电子地图直接影响自动驾驶行业的发展,但目前常用的导航地图存在精度不足、格式不一致等问题。自动驾驶高精度地图产业在我国尚处于发展初期。目前行业内还没有高精度地图的相关标准。
同时,与高速公路相比,城市道路更加复杂,自动驾驶的实现难度和挑战性更大,需要高精度地图的有力支撑。因此,需要根据普通道路特有的要素和特点,如普通路口、环形路、主辅路出入口等,定义数据模型和数据交换格式。从而为制作高精度城市道路地图提供标准规范,帮助解决不同城市道路不同地图之间数据不兼容、服务水平不一致的问题,为城市道路自动驾驶提供有力保障。
其中,两个标准定义的具体内容包括道路和对象两章。从自动驾驶地图的应用来看,道路模型主要是对表达现实世界的道路进行重构,提前告知车辆所在道路的信息,如限速信息、车道数、车道标线信息等;该对象模型主要用于与车辆感知数据进行匹配,以实现自动驾驶车辆的精确定位。
两个标准还规定了智能汽车电子地图中高速公路数据模型和交换格式的产品要求,包括术语和定义、精度、坐标系、数据内容和基本属性,以及电子地图数据的模型、不同类型数据在使用环境中的主要功能等。其智能导航定位产品以智能汽车电子地图为主要应用内容,如自动驾驶汽车、高级辅助智能驾驶汽车、高精度车辆监控调度等的生产应用。并且根据这个标准,中国地图厂商可以为用户提供统一数据产品描述的智能电子地图交换格式数据。
对于本标准的内容设置,起草组将高速公路的要素和框架放在一起讨论,将高速公路中的场景分别列出,从场景、模型、属性、几何、关联关系、表结构六个方面进行描述和规定,其中对象相关场景的关联关系提供了对象与道路之间的关联信息。
专用车道包括限制车道和可变车道。车道限制场景是车道内有一定时间段或特定车型的交通限制场景,车道限制信息主要包括车型、天气状况、通行时间等。可变车道场景是可以根据实时交通流量改变车道行驶方向的场景,根据行驶方向的范围可以分为常规可变车道和潮汐车道。
003010认为这些有限的信息和可变的信息对于自动驾驶汽车的自动驾驶是非常关键的信息,需要明确的设计定义和统一的表达方式。因此,对于特殊车道场景,本标准也定义设计为一个独立的子章节,包括限制车道和可变车道的属性、与道路的关系、表结构。
这两个标准虽然都是推荐性国家标准,但《征求意见稿》建议停车场和地图厂商按照此标准规范智能汽车电子地图的数据模型和交换格式(城市道路),并在全国范围内统一规范实施。
该标准通过统一道路、车道和路侧设施的表达方式、模型和交换格式,可以实现不同车辆和不同图形商数据之间的交互,最大限度地利用结果数据。解决不同城市道路不同地图之间数据不兼容、服务水平不一致的问题,为城市道路自动驾驶提供有力保障。
我国在智能网联领域发展迅速。随着各项政策标准的实施,高精度地图赋能的自动驾驶有望尽快实现。
现商业化落地。众所周知,在实现自动驾驶的过程中,高精地图+高精定位,是绕不过去和待解决的两个关键点。虽然目前各大科技巨头、传统地图公司以及初创企业,都在积极布局高精地图,欲占据主导优势,但如何进行落地依然是当前行业面对的问题。如何快速实现商业化,核心技术到底在哪里?
8月15号,盖世汽车在北京举办《2019自动驾驶地图与定位大会》,将围绕高精度地图与定位两个关键点,展开深入探讨。届时盖世汽车研究院资深分析师宋佰成、腾讯高精度地图负责人谷小丰、中国智能网联产业创新联盟自动驾驶地图与定位工作组秘书长江昆博士、西部数据产品市场总监张丹等多位行业大咖汇聚一堂,将带来一场干货满满的技术饕餮盛宴!
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
昌河北斗星X5试驾,简单几步,开启完美试驾之旅。首先,预约试驾,通过官网或4S店轻松完成;其次,到店后由专...浏览全文>>
-
北汽制造勇士试驾预约,是体验这款硬派越野车型的重要环节。4S店提供便捷的线上预约服务,用户可通过官网或电...浏览全文>>
-
极狐阿尔法T6试驾,开启完美驾驭之旅。外观设计动感时尚,线条流畅,充满未来感。内饰豪华舒适,科技感十足,...浏览全文>>
-
长安欧尚520试驾操作指南:1 启动车辆:插入智能钥匙,踩下刹车,按下启动按钮。2 选择驾驶模式:通过中...浏览全文>>
-
试驾五菱凯捷可通过以下几种途径:1 4S店试驾:前往当地五菱汽车授权经销商,直接预约试驾服务,专业销售顾...浏览全文>>
-
MINI试驾线上+线下操作指南线上预约:访问MINI官网或官方APP,选择“试驾预约”,填写个人信息、车型偏好及时...浏览全文>>
-
力帆预约试驾,一键搞定,开启豪华驾驶之旅。只需简单几步,即可在线预约心仪车型的试驾体验,省时又便捷。无...浏览全文>>
-
SONGSAN MOTORS试驾预约,开启非凡驾驶之旅!我们为您精心准备了多款高性能车型,无论您是追求速度的激情玩家...浏览全文>>
-
欧拉试驾预约,轻松几步,畅享豪华驾乘。只需三步,即可开启您的专属体验:第一步,访问欧拉官网或官方APP,点...浏览全文>>
-
MINI试驾,线上+线下操作指南线上预约:访问MINI官网或官方APP,选择“试驾预约”,填写个人信息、车型偏好及...浏览全文>>
- 北汽制造勇士试驾预约,4S店的贴心服务与流程
- MINI试驾,线上+线下操作指南
- 零跑汽车试驾,如何在4S店快速预约?
- 试驾MG4 EV全攻略
- 长安欧尚520试驾操作指南
- IPHONE 17 系列或将提供高达 35W 的有线充电
- OPPO FIND N5 推出迄今为止最薄的可折叠智能手机
- IPHONE 上的 CHROME 和 GOOGLE APPS 正在使用 CIRCLE 进行搜索
- OPPO 推出 WATCH X2
- NOTHING PHONE在 3 月 4 日发布前的完整详细信息
- Nintendo Switch 2 渲染图显示其支架经过重新设计,拥有新按钮,但缺少一个插槽Nintendo Switch 2 渲染图显示其支架经过重新设计 拥有新按钮
- 据传卡西欧 CRW-001 新款金色戒指手表即将上市
- FPGA 游戏机的灵感来自 PS One 起价 149 美元
- 伊利诺伊州住房市场在利率上升的情况下保持稳定
- Realme 14x 5G 搭载联发科 Dimensity 6300 SoC
- 三星 Galaxy S25 Ultra 渲染图泄露 显示圆角设计
- 预计三星 Galaxy S25 Ultra 的边框将比其前代产品更薄
- 三星 Galaxy Unpacked 2025 或将于 1 月 22 日举行
- Rivian 通过假日更新推出 Google Cast 支持
- 圣诞老人的房子在房地产网站上挂牌出售 估价 120 万美元